Jakie są metody programowania robotów przemysłowych?
Dynamiczny rozwój robotyki w ostatnich latach spowodował, że programowanie robotów przemysłowych stało się poszukiwaną specjalizacją. Samo programowanie robotów przemysłowych lub współpracujących może być wykonywane na wiele sposobów. Pierwotnie wszystko odbywało się w mało czytelny sposób tekstowy. Jednak wraz z rozwojem interfejsów graficznych i zaawansowanego oprogramowania, pojawiły się liczne ułatwienie. Poniżej przeczytasz o głównych metodach jakie składają się na dzisiejsze programowanie robotów przemysłowych i współpracujących.
Czytaj również:
Cztery główne metody programowania robotów przemysłowych
Metoda 1: Programowanie tekstowe

Pierwszy i najstarszy sposób to programowanie tekstowe, gdzie program wpisywany jest w postaci linijek kodu bezpośrednio na teach pendancie robota lub w oprogramowaniu off-line. To tradycyjna metoda w której konieczna jest znajomość komend robota i wiedza z zakresu robotyki.
Metoda ta jest stosowana głównie w robotach przemysłowych. Jednak nawet niektóre roboty współpracujące oferują możliwość programowania np w java script. Pomimo, że jest to bardziej zaawansowana metoda, to są sytuacje gdzie proście zapisać dany algorytm zapisem matematycznym niż wybierać mozolnie graficzne bloczki w edytorze. Poza opisaną tekstową metodą poniżej przedstawiam inne metody programowania robotów przemysłowych.
Metoda 2: Programowanie graficzne

Drugą metodą jest programowanie graficzne na teach pendancie, którym charakteryzują się szczególnie roboty współpracujące tzw. coboty. To prosta metoda, gdzie na osi czasu umieszczamy odpowiednie ikony np. ruchu, chwycenia chwytakiem, opóźnienia, czekania na sygnał z maszyny i wiele innych. Robot następnie odtwarza wprowadzoną przez nas sekwencję ruchu w pętli lub oczekując na sygnał wyzwalający działanie np. z maszyny lub przycisku operatora.
Zaletą metody graficznej jest łatwość programowania i szybkość nauki programowania mając na uwadze inne metody programowania robotów przemysłowych. W tym przypadku wystarczy już 1 godzina by programować proste ruchy. Dodatkowo dostępne są bezpłatne kursy on-line na których samodzielnie możesz się nauczyć programowania – Akademia HCR OnLine
Metoda 3: Programowanie przez wodzenie ramieniem robota

Trzecią metodą jest programowanie przez wodzenie za ramię. Wtedy naciskami na teach pendancie lub kiści robota przycisk uczenia i przemieszczamy ramię od punktu do punktu. To najprostsza metoda programowania, jednak obarczona błędem wynikającym z niewielkie dokładności ludzkiej ręki. W przypadku takim polecam hybrydowe programowanie polegające na pokazaniu – dojechaniu do punktu a następnie przyciskami +/- dostrojenie z żądaną dokładnością od 0,02 mm poczynając.
Metoda 4: Programowanie off-line
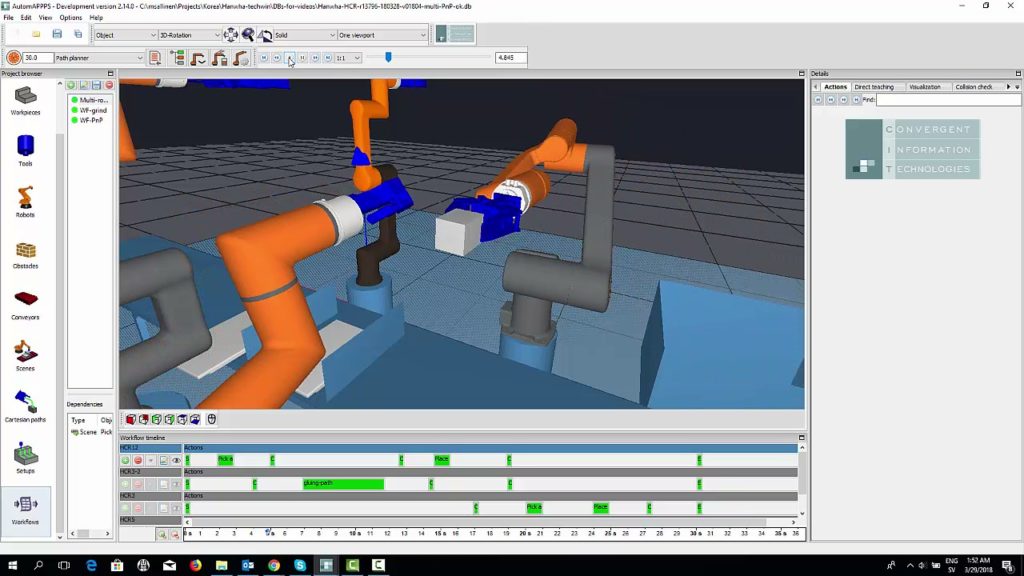
Kolejną metodą jest programowanie off-line w specjalistycznych narzędziach np. NACHI FD-Desk lub HANWHA RODI_off-line. Dostępne są również narzędzia do programowania off-line obsługujące wiele typów robotów np. AUTOMAPPPS czy RoboDK. W narzędziach tych możemy poza robotami umieszczać inne urządzenia i bryły 3D, np. transportery, maszyny, podajniki i wiele innych. Następnie możemy testować cykl pracy stanowiska lub linii sprawdzając wszystko przed wprowadzeniem do systemu produkcyjnego. To doskonałe narzędzia pozwalające przezbrajać roboty w krótkim czasie z minimalizacją przestojów.
Więcej informacji znajdziesz w sekcji oprogramowanie, gdzie opisane są poszczególne narzędzia.